
V předchozím díle jsme si připravili pomocí technologie 3d tisku díly ze kterých sestavíme konstrukci robota SMARS. Robot má ovšem i další elektronické a mechanické díly, které je třeba si připravit před sestavením SMARSE. K jednotlivým dílům budu připojovat orientační ceny (někteří z kluků měli starost, jestli SMARS nebude příliš drahý) z doby, kdy jsem si sestavoval první prototypy. Cena součástek je podle mě celkem minimální, ale to je pro každého asi relativní. Všechny součásti jsem zakoupil na laskakit, tudíž zde uvádím i ceny součástek v tomto obchodě uvedené ke dni publikování článku.
Hlavní součástky SMARSE
Arduino UNO – mikrokontroler a řídící jednotka
Arduino UNO slouží v sestavě jako řídící jednotka. Nejlevnější verze na laskakit je momentálně za 188,- (lze sehnat i levněji). Desku je možné volně vkládat, takže pokud vás SMARS omrzí, lze ji využít podobně jako další součástky i v jiných projektech. V základní verzi SMARSE deska umožňuje další rozšíření.
Prototypová deska pro Arduino UNO

Nástavbu v podobě dalších součástek propojuje prototypová deska – deska, kterou lze přiletováním dalších prvků a pasivních součástek proměnit v arduino shield. V konstrukci je napevno zapojená, po instalaci je další použití možné pouze po odletování přiletovaných součástí. Vzhledem k ceně, která na laskakitu činí 36,- je určena většinou pouze na jedno použití.
H-můstek L9110S

H-můstek (v předchozích kapitolách označovaný také jako motorový driver) slouží pro řízení a ovládání obou DC motorů SMARSE. Umožňuje přímé napájení obou motorů z 9V baterie a zároveň také i ovládání z arduina. Tato součástka není nijak drahá – 38,- kč. Při testování se mi několikrát stalo, že mi nevysvětlitelně odešla pod rukama. Poté co jsem sestavoval obvod s nasazenými chirurgickými rukavicemi se mi to nestalo ani jednou z čehož soudím, že je tato součástka náchylná k odprásknutí statickým nábojem, takže doporučuji při montáži si dát na to pozor.
DC motor GA12-N20 6V

Pro SMARSE jsou zapotřebí dva tyto motory. Cena za jeden kus činila 105,- kč. Při vybírání zvolte šestivoltovou verzi. Bude také zapotřebí vybrat verzi s požadovanými otáčkami (šel jsem zlatou střední cestou a vybral si verzi se 150 RPM – měla nejnižší proudový odběr ze všech nabízených verzí). Motorky mají k hřídeli přimontovanou poměrně kvalitní kovovou převodovku. Pokud se motory rozhodnete do šasi lepit (nebo lepit koleso na hřídel) – pozor na stékání sekundového lepidla po hřídeli, jakmile se dostane do převodovky spolehlivě ji slepí dohromady :-).
Bluetooth modul HC 05 TTL
Bluetooth modul HC 05 TTL v sestavě působí jako modul zajišťující bluetooth spojení mezi arduinem a chytrým mobilem. Zajišťuje tedy možnost dálkového ovládání robota. U tohoto modulu si hlídejte verzi 05 (pozor na záměnu s verzí 06) – je potřebná verze modulu typu master. Cena modulu je momentálně 118,- kč. Z výroby je modul nastaven na jméno HC 05 a pasword 1234 – vše lze později programově změnit.
Baterie ZNTER 9V LiPol

Devítivoltová baterie ZNTER slouží k napájení celé sestavy. Je dodávána i s dobíjecím kablíkem (lze snadno dobíjet přes USB port z počítače). Před použitím si raději přečtěte co všechno se s baterií nesmí – byli jste varování :-). Baterie má kapacitu 600 mAh a opravdu mi vydržela poměrně dlouho, než bylo nutné ji nabít. Cena 298,- kč.
Kalkulace sestavy
| Součástka | počet kusů | celková cena |
| Arduino UNO | 1 | 188 |
| Prototypová deska | 1 | 36 |
| H-můstek | 1 | 38 |
| DC motory | 2 | 210 |
| Bluetooth modul | 1 | 118 |
| Baterie | 1 | 298 |
Naprogramování Bluetooth modulu
Před samotným sestavováním je vhodné si předem naprogramovat bluetooth modul. Není to nutné, ale je to vhodné. Jedná se o nastavení vstupního hesla (aby vám s SMARSEM někdo neodjel) a jména, které bude modul vysílat do okolí (abyste si svého robota snadno rozeznali v šumu okolí).
Bluetooth modul HC 05 se programuje přímo v editoru arduino IDE z počítače pomocí AT příkazů ze sériového monitoru. Pro naprogramování modulu si vše zapojte dle následujícího zapojení.
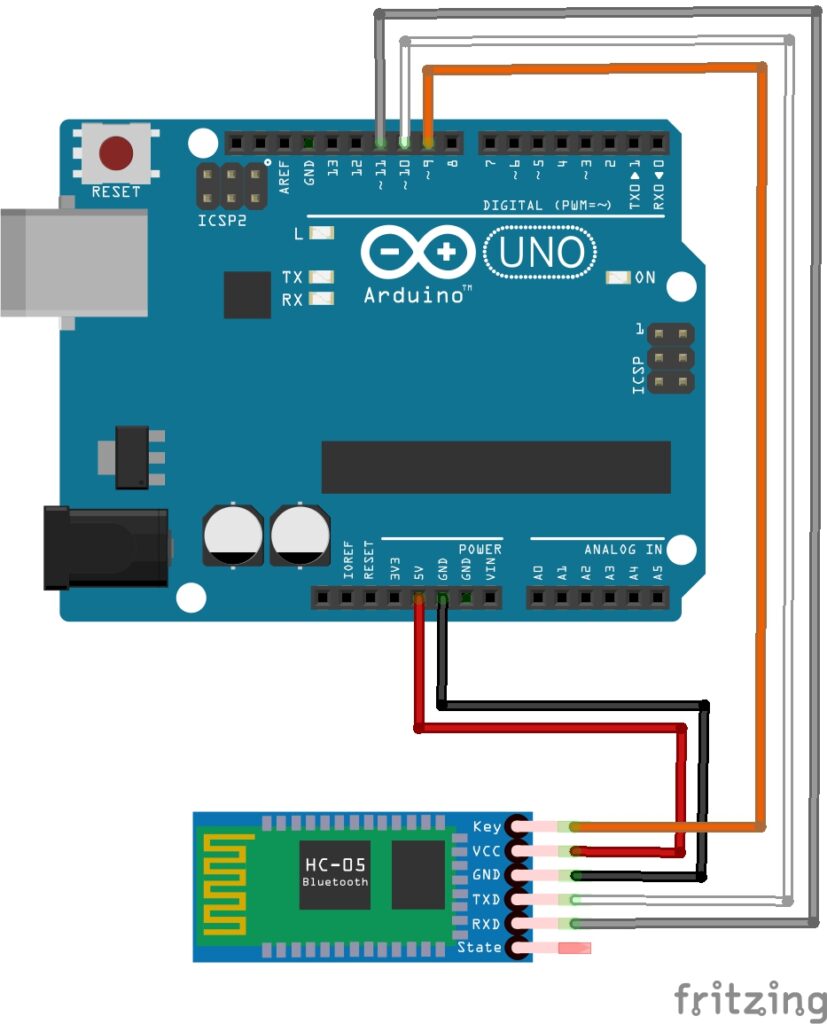
Poté do arduina nahrajte následující kód. Ke stažení v zipu zde.
| /* Skript určený pro navázání sériové komunikace s bluetooth modulem HC 05 a pro odesílání AT příkazů Zapojení desky+modulu: KEY – pin 9 TX – pin 10 RX – pin 11 příkazy: AT+NAME – odpověď je zobrazené aktuální jméno modulu (přednastaveno HC 05) AT+NAME=[vložit nové jméno modulu] – změna jména modulu AT+PSWD – odpověď je zobrazení aktuálního hesla modulu (přednastaveno „1234“) AT+PSWD=[„vložit nové heslo“] – změna hesla modulu */ #include <SoftwareSerial.h> SoftwareSerial BluetoothSerial(10, 11); // RX, TX – I/O výstupy pro sériovou komunikaci s modulem – možno změnit dle potřeby void setup() { pinMode(9, OUTPUT); digitalWrite(9,HIGH); // Otevře sériovou komunikaci a čeká na otevřeném portu: Serial.begin(38400); Serial.println(„Enter AT Commands“); BluetoothSerial.begin(38400); } void loop() { // nekonečná smyčka if (Serial.available()) { BluetoothSerial.write(Serial.read()); } if (BluetoothSerial.available()) { Serial.write(BluetoothSerial.read()); } } |
Samotný přenos kódu je dobře vidět na youtube zde. Problematické bývá spuštění v programovacím režimu modulu. Je třeba odpojit celou sestavu od napájení – vytáhnout kabel z USB – stisknout resetovací tlačítko na bluetooth modulu a znovu kabel zapojit. Že jste připraveni poznáte na změně blikání LED na modulu.
Další zapojení součástek proveďte podle následujícího schématu. Podrobněji popisuji postup v následující kapitole.

Poznámka: ve schématu je uvedena baterie 3,7 V. Nenašel jsem v editoru 9V baterii, takže samozřejmě použijte výše uvedenou 9V baterii ZNTER.