
Předpokládám, že již máte k dispozici všechny vytištěné díly robota (popsané zde) i elektronické součástky (popsané zde) a můžete si tak vyzkoušet sestavení základního kitu robota SMARS. Předem upozorňuji, že zde popsaný pracovní postup je postupem pro sestavení základní verze a není tesán do kamene, takže si postup měňte dle uvážení a potřeb (zejména pokud si konstrukci upravíte, nebo dokonce zdokonalíte).
Krok prvý – Sestavení pásů SMARSE
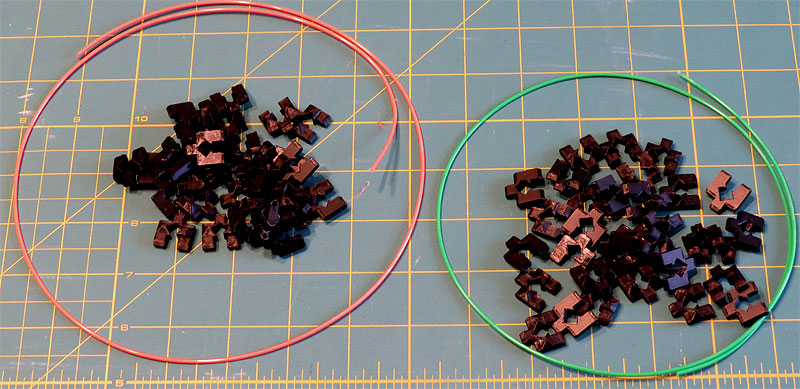
Připravte si 32 článků pásů a strunu filamentu. Cílem je čepy vyrobenými z filamentu propojit dva šestnáctičlánkové pásy pro budoucí pohon robota. Konce čepů z filamentu zatavte hrotovou pájkou tak, aby pásy zůstaly pohyblivé. Konce pak propojte a vyrobte tak jakési „náramky“. Výsledek celého snažení by měl vypadat, jako na následující grafice.

Krok druhý – příprava šasi SMARSE a jeho koles
Připravte si očištěná hnací kolesa a šasi a natavte do nich závitové vložky. Pokud nevíte jak na to, doporučuji si vše nanečisto vyzkoušet, případně shlédnout opět nějaké to instruktážní video. Po natavení závitových vložek by výsledek měl vypadat nějak takto, v šasi zatavené čtyři vložky, v hnacích kolesech dvě. Osa vložek by měla být kolmá k ose dílu. Pokud se vám „povede“ natavit vložku nakřivo, raději vše opakujte na nových dílech a nastavte nižší teplotu na pájce.

Závitové vložky jste jistě zvládli natavit. Já ještě z pilnosti každou projel šroubem o odpovídajícím závitu, abych měl jistotu, že je vše v cajku. Po instalaci závitových vložek si připravte hnaná kolesa a natlačte je na široké výstupky na šasi. Předem doporučuji věnovat pozornost začištění těchto os, aby se hnaná kola nezasekávala na nějakém tom otřepu.
Hnaná kolesa jsem natlačil na šasi SMARSE. Vložených motorků si nevšímejte. Výsledek této fáze by měl být čistě o přípravě tisknutých dílů – šasi a koles. Pokud jste uzavřeli postup v druhém kroku, měli byste mít připravené zkompletované pásy, připravené šasi s natavenými vložkami a nasazenými hnanými kolesy. Nesmíme také zapomenout i na hnací kolesa s natavenými vložkami. Špinavou práci máte za sebou, teď si začneme hrát s elektronikou.
Krok třetí – dokončení montáže podvozku
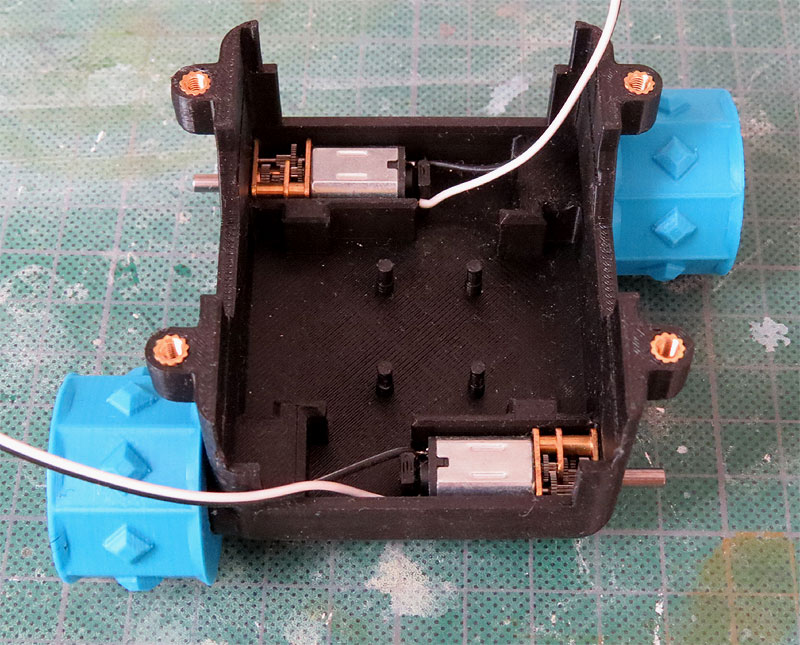
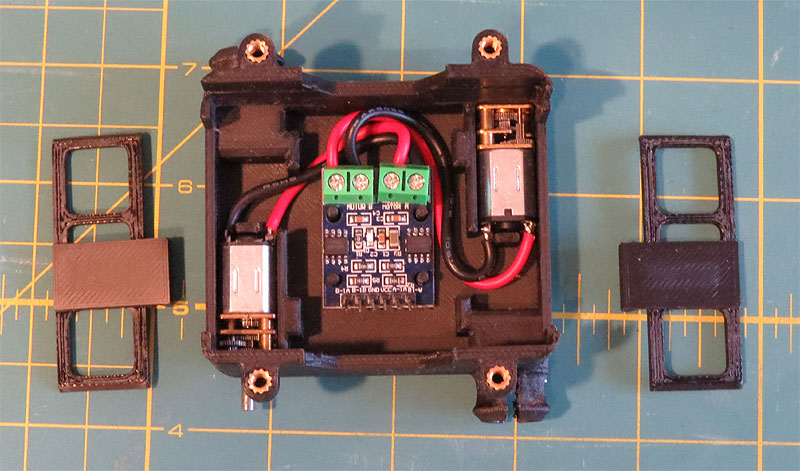
Ve třetím kroku se ze zámečníků měníme na elektroniky. Začneme přípravou motorků. Přiletujte si na motorky vodiče, ideálně v různých barvách, aby se v tom později dalo snadněji orientovat. Profíci u kablíků ještě proletují konce, budeme je vkládat do svorkovnice. Jak by měl vypadat výsledek můžete vidět na následujícím obrázku. Motorky již můžete vložit do šasi. Povšimněte si délky kablíků. V SMARSU je málo místa na kabeláž, takže je ideální propojovací kablíky dělat tak akorát.
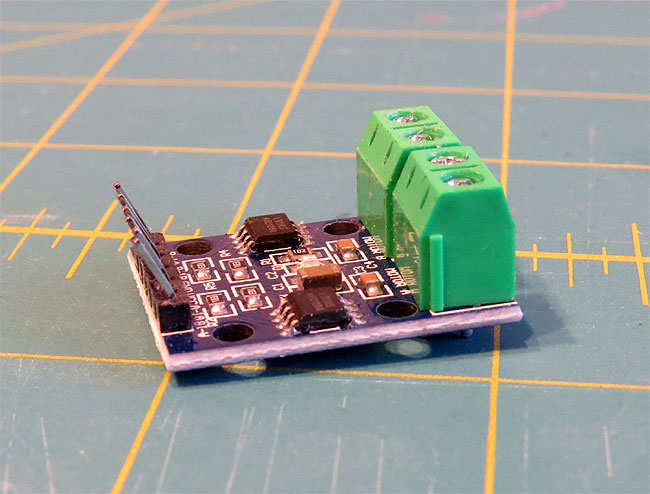
Dále pokračujeme přípravou H – můstku. Ta spočívá v mírném vyhnutí pinů (viz. následující obr.). Tuhle akci doporučuji provádět jemně a pokud možno v rukavicích, aby nedošlo k mechanickému poškození můstku, nebo odprásknutí součástek statikou. Cílem tohoto kroku je nasměrování budoucí kabeláže mimo desku plošného spoje s tím, že nám umožní lepší formování kabeláže ve vnitřním prostoru.
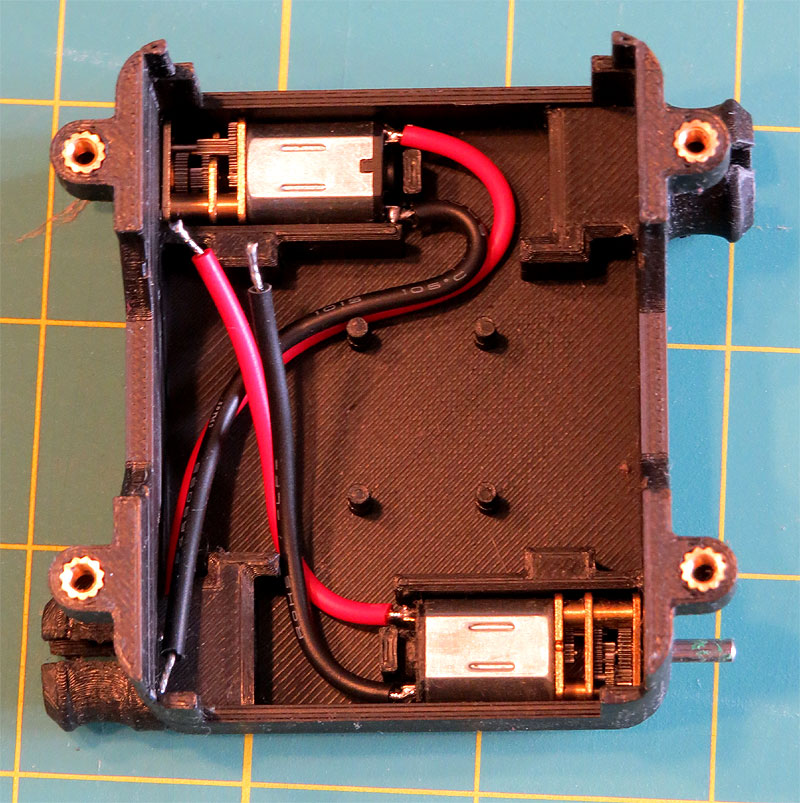
Do svorkovnic můstku zašroubujeme kablíky z motorků a vše postupně naformujeme tak, aby se to pohodlně vešlo do prostoru. Můstek nasadíme na trny na podlaze šasi (pokud to úplně přesně nepasuje – otvory v destičce můstku lehce propilujte kulatým jehlovým pilníkem). Pokud vše sedí jak má, zafixujeme celou sestavu holdery.
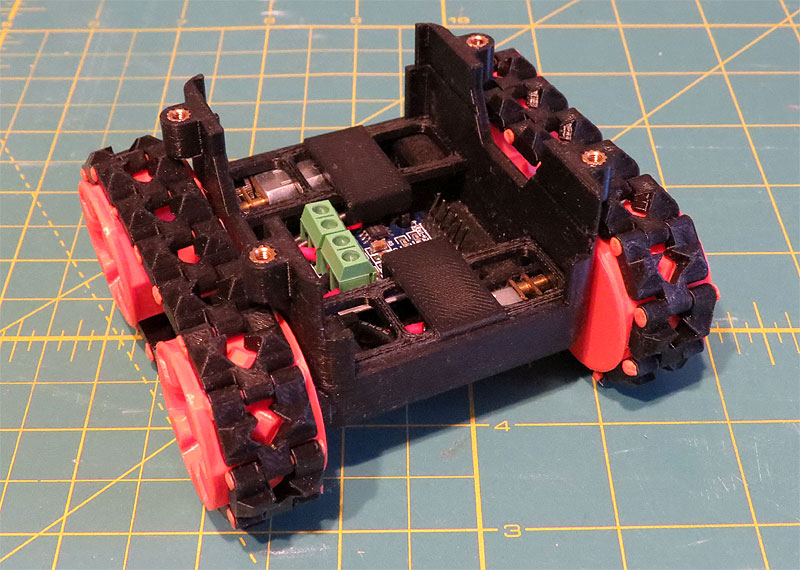
Po této fázi nasadíme na osy motorků hnací kolesa s pásy. Vše utáhneme a tím bychom měli mít připravený komplet podvozek SMARSE.
Poznámka: V této fázi ještě malá poznámka. Jako spojovací šrouby jsem použil šrouby M3 s válcovou hlavou o délce 10mm s inbusem. Pořídil jsem si i klíč a jednu chvíli jsem i koketoval s myšlenkou, že ho nějak přidělám přímo na robota, podobně jako měli tankisti potřebné nářadí přimontované na tancích. Ale klíč byl dlouhý a na robůtku málo místa. Pro mou chomutovskou smečku mám tip – vše se dá prima koupit v obchůdku s krásným názvem „Šrouby a matice“ k nalezení zde.

Krok čtvrtý – výroba arduino shieldu
V této fázi si vyrobíme elektronický prvek, který je ve světě arduino kutilů nazýván souhrnným a univerzálním výrazem „shield“. Jedná se o modul, který se nasadí do pinů arduina sendvičovým způsobem (ano vypadá to tak trochu jako štít) a buď doplní arduino rovnou celým obvodem, anebo jako v našem případě umožní pomocí JST konektorů propojení arduina s celou soustavou zbylých součástek. Cílem je zapojit arduino dle následujícího schématu (schéma jsme naťukli již v přechozí kapitole).

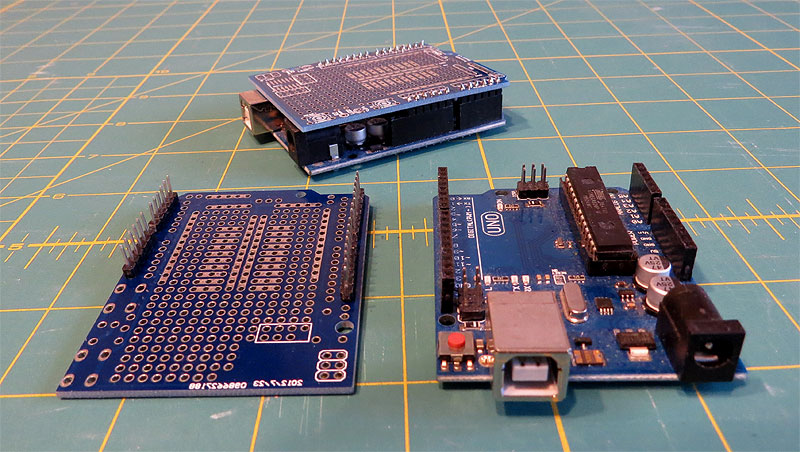
Za tímto účelem zahájíme letování nalámaných kolíkových lišet do prototypové desky tak, aby jí pak bylo možné zasadit do desky Arduina UNO. Na následujícím obrázku je myslím jasně naznačeno co je cílem celé operace a jak by měl vypadat výsledek,
Dalším krokem bude z druhé strany naletovat „zásuvky“ JST konektorů. Některé z nich nemusí být úplně přesně nasazeny stejně jako na obrázku, protože je budeme spojovat z druhé strany desky s piny kablíky (takže se částečně můžeme přizpůsobovat případné změně). Ovšem ty konektory, které budou připojeny k pinům arduina, které odesílají data do H-můstku a nebo ty které jsou zapojené jako vstup energie z baterky, je třeba osadit přesně. Výsledek by měl být následující. Pokud byste si nevěděli rady s přesným umístěním konektorů na desce „zkonzultujte“ problém se schématem zapojení obvodu výše.

Po naletování kolíkových lišet i JST konektorů si zkusmo nasaďte desku shieldu do desky arduina UNO. Vše by mělo pasovat a hlavně při nasazování a rozebírání nezohýbejte piny kolíků :-).
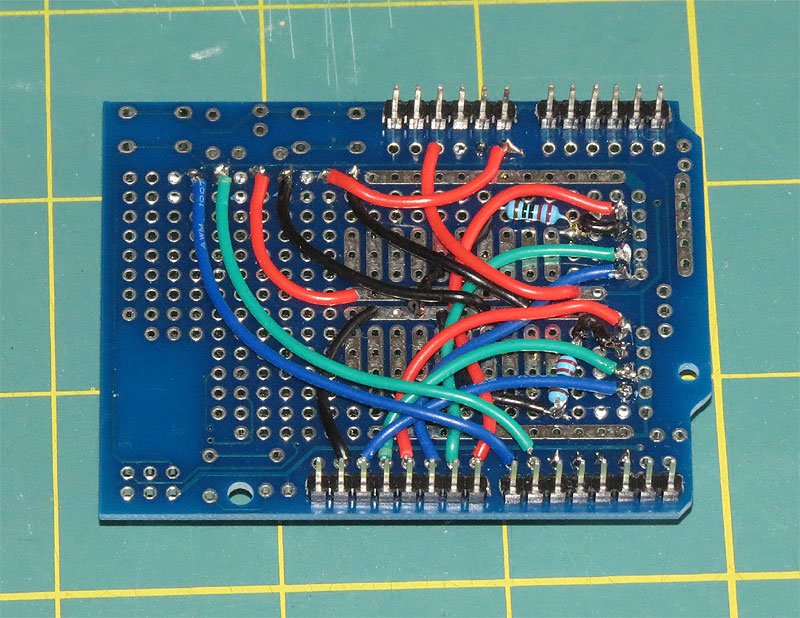
Poslední fází výroby shieldu je propojení obvodu kablíky. Úmyslně zde nebudu uvádět přesné zapojení. Zkuste zapojit hlavu, schéma obvodu a „přečtěte“ si popisky na prototypové desce. Měli byste rychle pochopit sami co propojit s čím. Vzhledem k tomu, že obvykle bývají součástky na deskách shieldů propojeny pomocí cestiček plošných spojů, ale my používáme desku univerzální, kde takové cestičky nejsou, musíme si „cestičky“ – propojení vyrobit sami pomocí naletování kablíků. Doporučuji držet se barevného schématu, abyste se v tom později snadno vyznali a na spojení GND a 5V používat sběrnice ve středu desky. Výsledek této fáze naleznete na následujícím obrázku.
V této části postupu je již arduino shield pro SMARSE hotový, ovšem zatím ho nenasazujeme na desku arduina a nevsouváme do podvozkového setu.
Krok pátý – výroba propojovací kabeláže
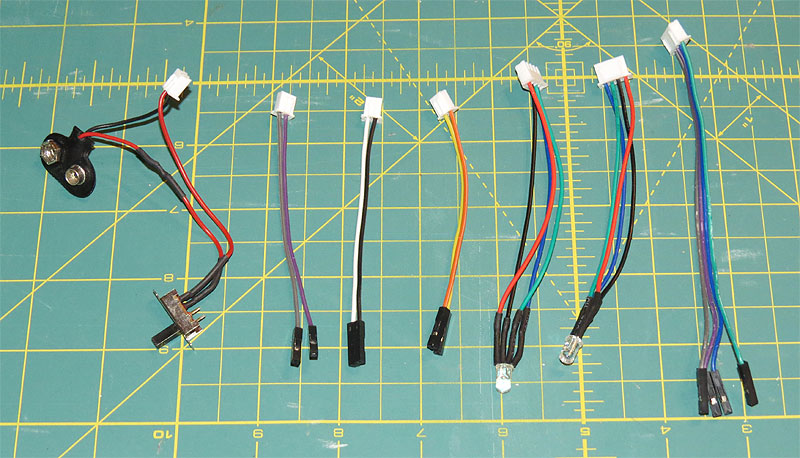
Zbývá dodělat zbytek kabeláže pomocí které připojíme externí součástky a prvky k desce shieldu a tím i k arduinu a celému obvodu. Při sestavování jednotlivých kablíků buďte pečliví, čistota a kvalita spojů následně hodně ovlivní poruchovost a kvalitu fungování robota. Kompletní sadu kabeláže SMARSE najdete na následujícím obrázku. Všimněte si využití dutinkových pinů ze startovacích sad arduina – stačí připojit na druhý konec JST konektor.
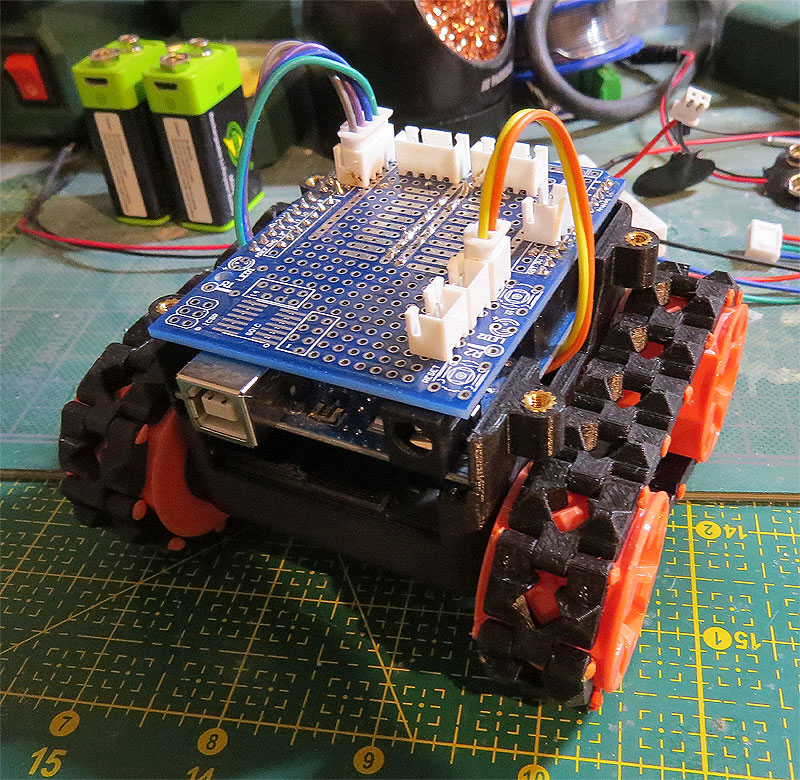
Nyní je na čase pohrát si s instalací kabelového propojení a postupně zapojovat kablíky do shieldu a sestavovat celého SMARSE. Začněte propojením H – můstku (4 pinový datový kablík + 2 pinový kablík napájení motorů). Nepopleťte polaritu, opatrně propojte kablíky s můstkem, nasuňte desku arduina s nasazeným shieldem do podvozku a vložte JST konektory do odpovídajících protikusů (viz. následující obrázek).
Nyní budete muset být velmi šikovní a přesní. Ve SMARSOVI je za prvé velmi málo místa pro další kabeláž a za druhé se konektory nesmí rozpadnout, nebo dotýkat dalších spojů. Kablíky raději rovnejte na šikovnost než na sílu a snažte se, aby se drátky nezapletly do pásů. První si sestavte vrchní kryt SMARSE dle následujícího obrázku. Osaďte spínač a konektor pro připojení baterie protáhněte otvorem do bateriového prostoru na hřbetě SMARSE. Otvory pro spínač a RGB LED diody jsou úmyslně spíše menší, aby tam součástky byly napasované trošku na sílu a pevně držely i bez lepení. V případě nutnosti otvory v krytu opatrně rozšiřte jehlovými pilníky.

Do horního krytu zasuňte RGB LED diody a do shieldu připojte destičku bluetooth modulu. Bluetooth leži ve SMARSOVI na volno, takže doporučuji druhou stranu modulu pro jistotu (zejména v oblasti pinů, kde jsou výstupky letování) přelepit izolepou pro ochranu proti náhodnému dotyku s živou částí na shieldu. Při připojování bluetooth modulu si hlídejte polaritu napájení a správné zapojení RX a TX pinu k shieldu (viz. schéma zapojení obvodu).
V této fázi jsou ještě SMARS a horní kryt odděleny, což se nyní změní. Buďte opatrní při formování kabeláže ať nikde nic neskřípnete a vše pasuje. V prostoru uprostřed shieldu by měl volně ležet zapojený bluetooth. Vložte konektory obou RGB LED do odpovídajících slotů. V této fázi, pokud je do SMARSE již zaveden program a vložena baterie, již můžete testovat opatrně funkčnost robota (zejména pokud si nejste jistí, že je vše jak má být). Pokud je test OK a SMARS reaguje jak má, vypněte spínač a vše opatrně sešroubujte dohromady, Měli byste mít hotovo.
